- 13 November 2025. Our paper “Dynamic Sparsity: Challenging Common Sparsity Assumptions for Learning World Models in Robotic Reinforcement Learning Benchmarks” has been accepted to AAAI 2026! Kudos to all authors!
- 18 September 2025. I gave a talk (video) at the RLBootcamp, an amazing event organized by Fraunhofer. It has been an exciting experience!
- 17 September 2025. We got two papers accepted at EWRL: Pink Noise LQR: How does Colored Noise affect the Optimal Policy in RL? and Revisiting Proximal Policy Optimization: kudos to all authors!
- 1 August 2024. Our paper “Revisiting On-policy Deep Reinforcement Learning” with Mahdi Kallel, and Carlo D’Eramo has been accepted at EWRL 2024! https://openreview.net/pdf?id=SYV6AlWh9P
- 1 July 2024. Our paper “Local Linearity is All You Need (In Data-Driven Teleoperation)” has been accepted to IROS 2024!
- 18 April 2024. I am an invited speaker at the Mila – Robot Learning Seminar and talked about “Efficient Action Representation for Robot Learning”. Here is the video of my talk.
- 12 January 2024. I am an invited speaker at the Mini-Workshop on Reinforcement Learning in Mannheim, Germany. Here are the slides of my talk.
- 20 July 2023. Our workshop paper A Gradient Critic for Policy Gradient Estimation has been accepted to EWRL!
- 21 June 2023. We got two papers accepted at IROS 2023: Deep Probabilistic Movement Primitives with a Bayesian Aggregator and Variable Decision-Frequency Option Critic!
- 10 May 2023. We got two workshop papers accepted at ICRA 2023 https://sites.google.com/view/rap4robots. They will be uploaded on Arxiv soon!
- 1 September 2022. I start today my new job as an Assistant Professor at the University of Innsbruck!
- 15 May 2022. Our paper A Temporal-Difference Approach to Policy Gradient Estimation has been accepted for publication at ICML!
- 22 Mar 2022. We got three workshop papers accepted at RLDM! Two of them are about our previous publications at AISTATS, and the third one is about A Temporal-Difference Approach to Policy Gradient Estimation (8 pages version)!
- 8 Jan 2022. We got two papers accepted at AISTATS: Model-Free Policy Learning with Reward Gradients and An Alternate Policy Gradient Estimator for Softmax Policies!
- 7 June 2021. Our journal Batch Reinforcement Learning with a Nonparametric Off-Policy Policy Gradient has been accepted at TPAMI!
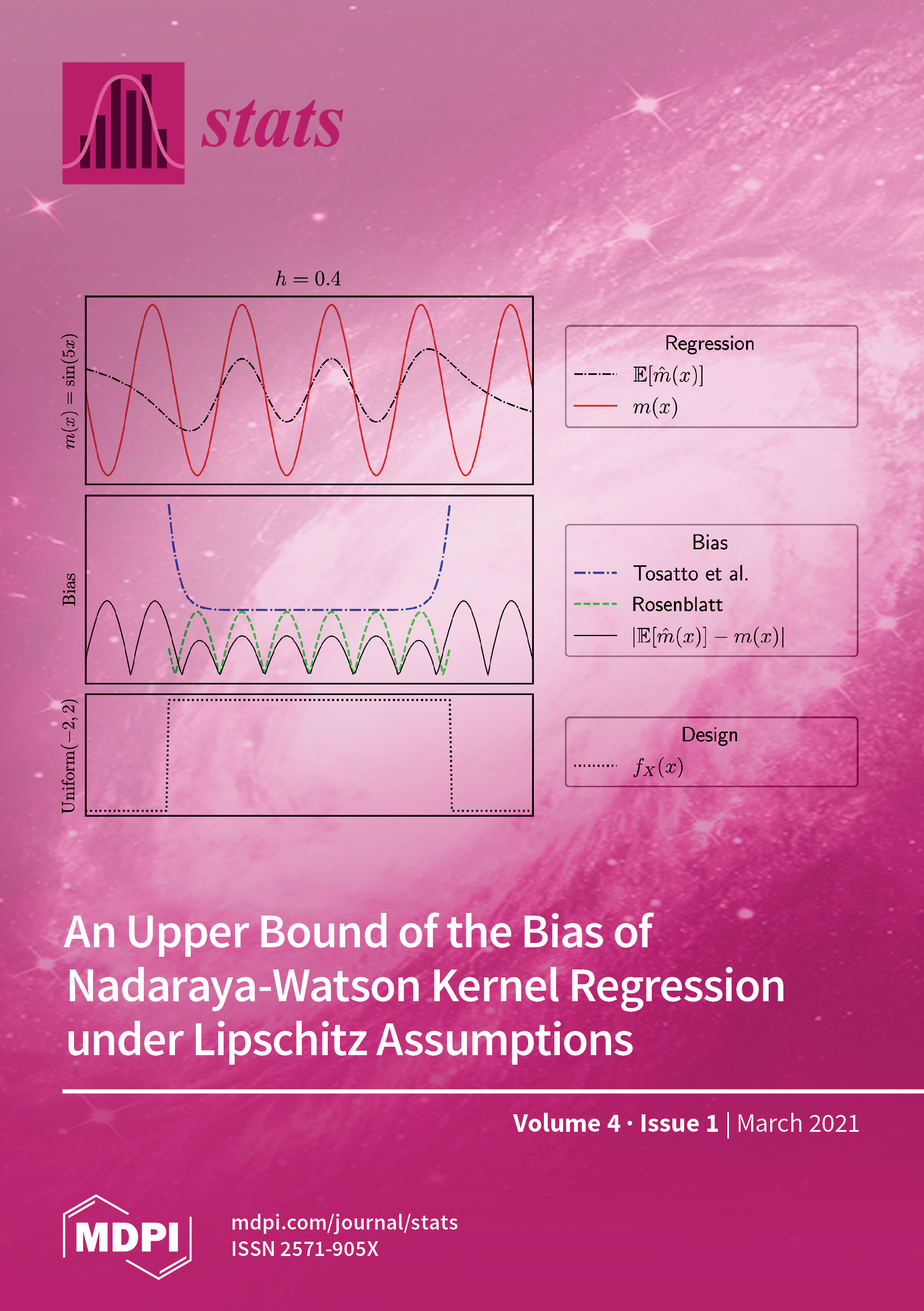
- 24 March 2021. Our journal An Upper Bound of the Bias of Nadaraya-Watson Kernel Regression under Lipschitz Assumptions featured in the cover of the issue, MDPI, Stats vol 4, issue 1.
- 1 March 2021. Our paper Contextual Latent-Movements Off-Policy Optimization for Robotic Manipulation Skills has been accepted at ICRA 2021!
{kind=link}